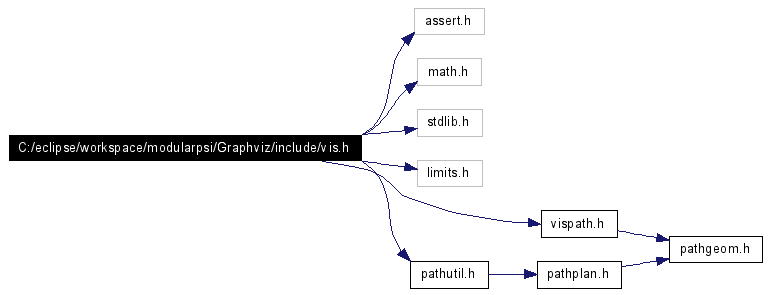
#include <assert.h>#include <math.h>#include <stdlib.h>#include <limits.h>#include <vispath.h>#include <pathutil.h>Include dependency graph for vis.h:
Go to the source code of this file.
Defines | |
| #define | OBSCURED 0.0 |
| #define | EQ(p, q) ((p.x == q.x) && (p.y == q.y)) |
| #define | NEQ(p, q) (!EQ(p,q)) |
| #define | NIL(p) ((p)0) |
| #define | CW 0 |
| #define | CCW 1 |
Typedefs | |
| typedef COORD ** | array2 |
| typedef unsigned char | boolean |
Functions | |
| COORD * | ptVis (vconfig_t *, int, Ppoint_t) |
| int | directVis (Ppoint_t, int, Ppoint_t, int, vconfig_t *) |
| void | visibility (vconfig_t *) |
| int * | makePath (Ppoint_t p, int pp, COORD *pvis, Ppoint_t q, int qp, COORD *qvis, vconfig_t *conf) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
||||||||||||||||
|
|
|
|
|
